
Eyes in the sky
New developments in drone technology are paving the way for widespread adoption of the machines across a range of commercial applications. Jacob Harris explains.
Unmanned aerial vehicles (UAVs), commonly known as drones, are just about everywhere you look nowadays and are being used for everything from film making to tracking sharks on the NSW coast.
According to Juniper Research, commercial drone sales are expected to rise by 84% this year alone, with annual sales approaching US$500 million. And as the technology continues to become cheaper, more robust and more accessible, their usage seems set to become even more widespread in an ever increasing variety of scenarios.
One development that seems set to broaden the scope of application for drones is a 3D LiDAR (laser mapping technology) payload named Hovermap that has been developed by the CSIRO.
“Most UAV systems you buy off the shelf rely on an expert pilot – there’s no collision avoidance – so if the pilot does the wrong thing the UAV is going to crash into anything that’s nearby. We’ve been trying to solve this problem by adding stereo cameras, LiDAR systems and radar to UAVs for many years, allowing them to sense the world around them in 3D and react to obstacles,” says principle research scientist and leader of the Robotic Systems Team in CSIRO’s Data61 division, Dr Stefan Hrabar.
Hovermap differs from past efforts because of its ability to use LiDAR to simultaneously map its surroundings while sensing its position in the 3D space without the need for GPS.
“The technique is called Simultaneous Localisation and Mapping (SLAM). This allows anything that is carrying a laser to use information generated by that laser to build a map and at the same time figure out where it is in that map. So it’s localising and mapping simultaneously, in real time – figuring out where the obstacles are and preventing the pilot from flying in to things,” says Stefan.
While there are other UAV systems that use LiDAR to sense or map the environment, these systems rely on GPS and inertial navigation systems (INS) integration to estimate the position and orientation of the LiDAR. This often renders them incapable of flying indoors, underground or close to structures that interfere with GPS signals. But because Hovermap uses SLAM technology, it is able to operate effectively in these areas.
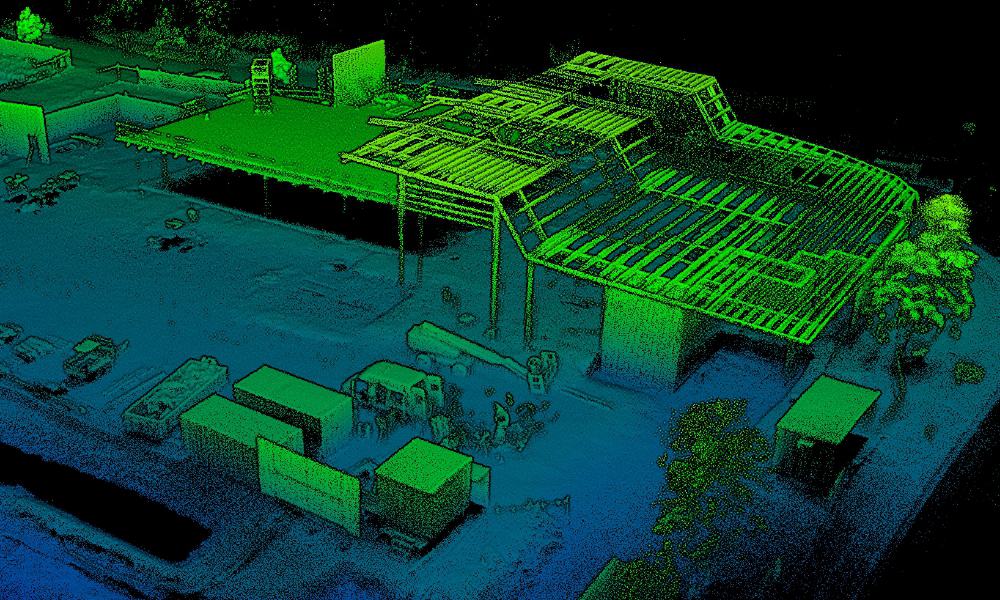
The system can be used in two ways: one is to generate 3D maps and take measurements using the LiDAR, while the other is to carry out close-up inspections using cameras and other sensors by exploiting Hovermap’s ability to safely fly close to structures.
“If you need the 3D structural information to take measurements or see if something’s moved, you use the LiDAR map. But if you need to do a visual inspection – if you’re looking for small cracks or rust for example – you’re not going to see that in the LiDAR, there’s just not enough resolution in the data. You need a camera on board,” says Stefan.
Hovermap’s collision avoidance and pilot assist modes are currently being flight tested and will effectively reduce the cognitive load on the pilot, allowing them to focus more on the mission than on piloting the UAV. The system calculates the best flight speed and optimal distances from structures when undertaking mapping and inspection tasks and ‘knows’ where it’s been, ensuring no blind spots are created. This reduces the necessary skill level of the pilot, making the technology accessible to a much broader user base.
Stefan’s team are also in the process of making it possible to integrate photographs taken by Hovermap into the LiDAR map. Though still in development, this capability will see information from the LiDAR and the camera combined with a high degree of accuracy. Because Hovermap uses its onboard laser as a positioning system (it is a far more straightforward process to locate the position of the camera in relation to the laser, as opposed to a GPS satellite) Hovermap is able to pinpoint where an image was taken with far greater accuracy than a system using a GPS.
“When you take a picture you will know exactly where that picture was captured from. If you have the 3D map and an image, you will be able to project the image information onto the map and alternate between the two. So if you
click on the 3D view you’ll be able to show up the 2D photographic images that cover that point in space and if you click on something in the image it will show you where that feature is in the 3D space,” says Stefan.
The ability to combine this information with such a high level of accuracy will open up a range of possible applications in construction, asset management, mining and energy, agriculture and even forensics.
“Police are interested in using this for crime scene mapping, they’re already using the hand held version (called Zebedee) but part of what they need to do when they collect evidence is take photos. If there’s been a motor accident for example you won’t see a skid mark in the laser scans because it’s just a difference in colour. But if you’re capturing LiDAR and images at the same time and you want to take a measurement of how long that skid mark was, because we’ve got the 3D map and the images you could click on the beginning and end of the skid mark in the image and use the associated 3D layer to take the measurement,” says Stefan.
Queensland company V-TOL Aerospace is collaborating with CSIRO as its product testing and commercialisation development partner by exploring Hovermap applications, while the payload’s immediate primary uses include mapping vertical assets, surveying and measuring variations on large construction jobs, they believe the roll on effect will soon be felt in the small-medium business sector.
“We’ve actually migrated towards the smaller end of town operating <20kg UAVs because we think it’s going to be a very big market. It’s already starting to grow because of the many consumer-level products becoming available. But there’s a gap between entry-level and the big end of town and that area is where there’s a real commercial opportunity – provided the products and service options are bundled effectively,” says V-TOL managing director Mark Xavier.
Mark believes that most organisations that need geospatial information, whether it’s photography, video or survey maps, will have easy low-cost access to it in the near future and he also points out that the technology will mitigate risks to workers by reducing the need to use cherry pickers and the like for maintenance and inspections at height. Instead, the machine will carry out all the risky work, thereby reducing the risk of falls and other injuries.
This isn’t the end game for this technology though – not by a long shot. Collision detection and avoidance is going to be a key enabler for many applications. Both Stefan and Mark agree that although regulatory issues pose a significant hurdle, delivery drones dropping parts to remote job sites could soon be technologically viable.
This being the case, Mark is of the opinion that much publicised efforts such as Amazon Prime Air and Google’s Project Wing to establish large scale drone-based delivery services are still quite a way off.
“The idea of Amazon delivering things by dropping them through a chute or leaving items at a door step in urban areas is a little bit farfetched at this point in time. That’s not to say that it’s not possible technically, and eventually acceptable to the regulators, but I just wonder about the economic viability of it because it’s not cheap.
“Unless you’re mass producing these things and they all behave and network properly, it’s going to be as difficult to do that as having autonomous vehicles on the roads. The technology is really jumping ahead but I don’t know whether we’re there yet and the regulations will definitely take a while to catch up,” says Mark.
While we shouldn’t expect to see droves of self-flying robots in the skies overnight, autonomous flight is no longer something that is relegated to realm of science fiction. Stefan foresees, and is working towards, autonomous flying robots with the ability to map whole areas unassisted.
He also sees the price point of UAV devices dropping significantly in coming years and points out that the boom in research into self driving cars is pushing the physical size and cost of collision avoidance sensors down significantly. Once the price of sensors and related components is sufficiently reduced, it’s quite possible that small, off the shelf consumer UAVs will come with sensors on board and be able to detect obstacles and keep themselves and other airspace users safe.
“There’s a big future for this type of technology. The combination of collision avoidance and 3D mapping without GPS enables a host of new applications for UAVs. With these you’re suddenly able to do a lot of things you couldn’t do before – it’s a synergistic outcome with huge potential for impact in Australia and the rest of the world,” says Stefan.